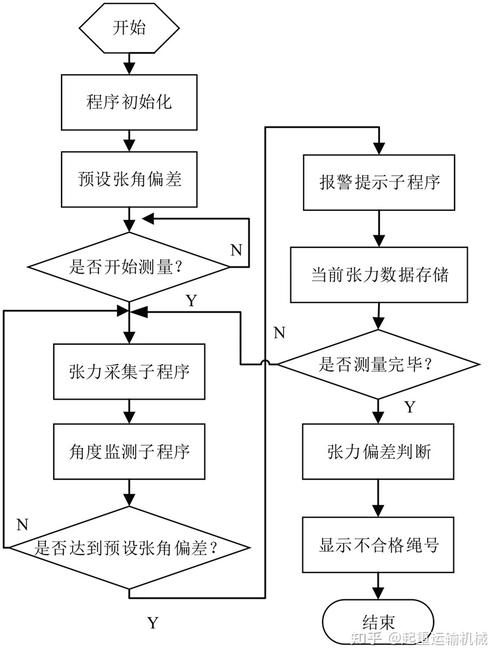
张庆丰 赵德栋 严怀钰 魏 斌 黄 杰宁波市特种设备检验研究院 宁波 315048摘 要:设计了一种具备一工装结构的电子式电梯钢丝绳张力计该张力计操作方式类似于普通弹簧秤测力法,通过工装结构中的角度监测单元实时监测受拉钢丝绳的张角值以确定各钢丝绳被拉至同一水平径向位置的方式,提高了张力测量精度和操作便捷性为实现张力计的功能,开发了一种基于MCU dsPIC30F4012 为主控芯片、以HX711+ 悬臂梁传感器为张力采集模块,以AS5045 为角度监测模块的张力计软件控制系统,系统软件基于模块化思想,把张力计整体功能模块分解成各个功能子模块在主程序中分别调用功能子模块程序,以实现张力计对张角、张力数据采集处理,判断张力差是否超标,并实现了显示、报警提示等相关人机交互功能关键词:张力;工装结构;控制系统软件;便捷;模块化中图分类号:TU857 文献标识码:A 文章编号:1001-0785(2020)23-0069-070 引言目前,电梯钢丝绳张力检测法主要有2 种[1],一种是弹簧秤测力法,另外一种是电子张力计法普通弹簧秤测力法为人处于轿顶,操作弹簧秤逐一拉动各钢丝绳至同一水平径向位置,记录每根钢丝绳的张力值,计算出各钢丝绳的平均张力,再计算各钢丝绳的张力与平均张力的偏差是否在5% 的允许范围内该方法虽简单直观,但需同时控制距离和张力2 个物理量,操作时不仅需要用刻度尺来确定各钢丝绳是否拉至同一水平径向位置,同时还需关注弹簧秤的张力值,操作不便,测量精度低下,往往不适合一个人在轿顶操作现有的电子张力计均由“三点法”原理研制而成[2],虽张力测量精度大大提高,但是体积、质量较大,易于与钢丝绳或其他轿顶设备产生干涉,不便在轿顶复杂环境中操作有些电子张力计的研发也并不是专用于电梯钢丝绳张力的测量,在设计时,未考虑测量环境的复杂性和特殊性现有电子式张力计还存在一个缺点,在测量各钢丝绳张力时,需要手动加载各钢丝绳至同一水平径向位置电子张力计虽然能显示张力值,但存在读取钢丝绳径向位移的麻烦,难以精确保证手动加载各钢丝绳至同一水平径向位置钢丝绳张力对电梯运行至关重要,但目前缺乏一种结构小巧、携带方便、操作便捷、效率高、精度高、专用于电梯钢丝绳张力检测的张力计,故设计开发了一种在操作方式上类似于普通弹簧秤测力法,具有一工装结构装置,能自动判断张力是否超标的电子式张力计该张力计结构精巧,便于携带,吸取了普通弹簧测力法简单直观的优点,又兼顾了电子张力计精度精准,能自动判断张力差1 张力计的结构及工作原理普通弹簧秤测力法需用刻度尺肉眼观察各钢丝绳是否拉至同一水平径向位置,在轿顶复杂环境中操作相对繁杂,费时费力根据三角关系,若拉动同一水平面上的各钢丝绳至相同水平径向位置,那么各弯折钢丝绳在拉力点所形成夹角(以下简称张角)必然是相同的,而角度的采集,相对于距离的测量,更为简单容易因此就通过简单的张角测量,就可以确定钢丝绳的拉动距离,避免了肉眼读取刻度尺所带来的误差和操作上的烦琐为了测量受拉弯折钢丝绳的张角,开发了一种钢丝绳的工装结构[3],其结构如图1 所示1. 钢丝绳上套环 2. 上转动杆件 3. 角度监测单元4. 转动止挡 5. 钢丝绳下套环 6. 下转动杆件7. 转动销轴 8. 复位弹簧图 1 工装结构装置结构图工装结构主要由上下转动杆件、角度监测单元、转动止挡等组成上下转动杆件的上下端分别由可供钢丝绳伸入,与钢丝绳紧密配合的上下套环构成上下转动杆件与转动销轴配合形成转动副,转动轴端部安装有角度检测单元,用于采集上下转动杆件的转动角度在转动止挡与复位弹簧的共同作用下,使上下转动杆件保持在预备初始位置(两杆成180°)工装结构的结构简图如图2a、图3a 所示,CAO1 即为上转动杆件,DBO1即为下转动杆件其中CA 垂直于杆件AO1,杆件CA垂直于上套环,杆件DB 垂直于杆件BO1,杆件DB 垂直于下卡套,且CA=DB,AO1=BO1,当工装结构与钢丝绳套接在一起,在上下杆件中心点O2 水平径向拉动钢丝绳,根据以上几何关系可得,两转动杆件所形成的张角β 始终等于弯折钢丝绳所形成的张角α若拉力消失,在弹簧力与转动止挡的作用下,工装结构有恢复到预备初始位置综上所述,通过钢丝绳工装结构中的角度监测单元精确的获取受拉弯折钢丝绳的张角,来间接确定各钢丝绳拉至同一水平径向位置,确保了测量精度张力计的工作原理如图2b、图3b 所示,只要逐一拉动各钢丝绳至同一预设定张角,系统自动存储当时的张力值,且发出报警提示声,提示测量人员完成该根钢丝绳张力的测量,进入下一根钢丝绳张力的测量测量完毕时,张力计通过计算,显示不合格钢丝绳绳号1. 上套环 2. 上钢丝绳 3. 下钢丝绳4. 下套环 5. 下杆件 6. 复位弹簧 7. 上杆件(a)预备初始示意简图(b) 预备初始状态三维图图 2 工装结构预备初始状态上套环 2. 上弯曲钢丝绳 3. 下弯曲钢丝绳4. 下套环 5. 下杆件 6. 复位弹簧 7. 上杆件(a) 受拉工作示意简图(b) 受拉工作状态三维图图 3 工装结构受拉工作状态为实现上述功能,开发了以MCU dsPIC30F4012 为核心的主控芯片、以HX711+ 悬臂梁传感器为张力采集模块,以AS5045 为角度监测模块的张力计硬件控制系统框架控制系统软件采用主程序模块和子程序模块子程序主要由各个特定功能模块程序组成控制系统主程序主要实现各个子程序模块的调用,实现了一种便捷式电梯钢丝绳张力计对各受拉钢丝绳张力偏差判断并显示的功能2 主程序软件子程序模块主要包括张力采集子程序、预设张角偏差子程序、张角监测子程序、CN 中断按键功能子程序、数据中值平均化处理子程序、张力偏差判断子程序、报警提示子程序、数码管显示子程序等为实现张力计功能,主程序对上述子程序实施调用程序初始化主要完成I/O 引脚输入输出定义、I/O 引脚功能设置、定时器tiner1 初始化设置、按键功能CN 中断设置等预设张角偏差值、是否开始测量、是否测量完毕的确定取决于是否按下相应的功能按钮主程序流程如图4 所示图 4 张力计主程序流程3 子程序软件3.1 张力采集子程序张力传感器采用的是400 N 的悬臂梁传感器[4],传感器的满量程电压= 激励电压× 灵敏度1.0 mV/V,而激励电压为5 V,故该传感器的满量程电压仅为5mV选用一款专为高精度电子秤而设计的24 位A/D转换芯片HX711,设置可编程增益为128 的通道A 作为张力差分输入信号口而张力数据A/D 转换完成,需通过HX711 的串口通讯口管脚PD_SCK 和DOUT来进行数据传递对HX711 张力数据读取流程如图5所示DO_IN 为dsPIC30F4012 中读取HX711 张力数据的引脚,与HX711 中的DOUT 相连而CK_OUT 为脉冲发送引脚,与HX711 中的PD_SCK 相连只有当DO_IN 从高电平变为低电平时,才能开始读取HX711中的24 位张力数据每当脉冲信号CK_OUT 从低电平转换到高电平,DOUT 输出1 位张力数据直至发送完24 个脉冲信号,变量Count 即为24 位张力数据SRbits.IPL=7 是为了把CPU 的中断优先级置为7,以避免读取张力数据时,CPU 被中断,影响张力数据读取准确性3.2 张角监测子程序为了实时监测受拉弯折钢丝绳的张角,采用磁性角度传感器芯片AS5045[5],AS5045 的同步串行接口与dsPIC30F4012 进行数据传递, 流程如图6 所示CSN_OUT 为AS5045 片选信号,DO_IN 为dsPIC30F4012 中读取AS5045 张角数据的引脚CLK_OUT 为脉冲发送信号当脉冲由低电平到高电平时,dsPIC30F4012 即可向AS5045 读取张角数据因AS5045 为12 位霍尔角度传感器芯片,故发送12个脉冲后,变量Content_pos 后12 位数据即为张角数据图 5 张力采集子程序图 6 张角监测子程序3.3 预设张角偏差子程序不同电梯的钢丝绳直径、材质、布置方式不同,故水平径向拉动钢丝绳至同一距离,钢丝绳在受拉点所形成的弯折角( 张角) 是不同的,且不同类型的钢丝绳其受拉软硬程度也是不一致的,故需设置不同的张角偏差值把不同的张角偏差值分为5 个等级,每一等级的张角偏差值是不一样的,具体偏差值由数组Angle_yushe[5] 中的5 个元素决定张角偏差设置流程如图7 所示,Key_next 键用以切换张角偏差等级Angle_yushe_code,且4LED 数码管显示张角偏差等级,直到按下Key_determine 键,来确定张角偏差等级图 7 张角偏差设置子程序3.4 张力偏差判断子程序待张力计测量完毕各钢丝绳的张力,张力计进入张力偏差判断, 逐一判断各钢丝绳的张力与平均张力的偏差值与标准值0.05 的大小, 大于0.05 则该根钢丝绳张力超标,反之合格软件流程如图8所示3.5 数码管显示子程序3.5.1 芯片74HC595 串行输入并行输出程序张力计的显示主要由4 个8 段码LED 数码管组成,而8 段码LED 由2 块7 4 H C 5 9 5 来驱动, 2块7 4 H C 5 9 5 级联而成, 实现了段码及位码数据的串行输入并行输出功能, 软件流程如图9所示X 为要输出的8 位段码或位码,DIO_OUT 为74HC595 串行数据输入口,SCLK_OUT 为数据输入时钟信号,RCLK_OUT 为锁存时钟信号, 整个LED_OUT( ) 程序实现了把段码或位码从高位到低位逐位串行移位8 位并行输出的功能图 8 张力偏差判断子程序图 9 串行输入并行输出子程序3.5.2 数码管动态显示输出程序4LED 数码管要实现动态显示只需调用函数LED_Display(GW,SW,BW,QW),显示内容由4 个形参GW,SW,BW,QW 的数值所决定GW,SW,BW,QW 是指距段码表数组LED_OF[ ] 首地址的长度如GW=1,SW=2,BW=3,QW=4 即为元素LED_[1],LED_[2],LED_[3],LED_[4] 段码所对应的显示内容段码表数组LED_OF[ ] 中的元素为数字、带小数点的数字、全灭、部分英文字母等段码4 个LED 数码管的位选由位码数组bit_Select[4] 中的4 个元素确定,bit_Select[0] 的位码由595 并行输出代表使能GW数码管,bit_Select[1] 代表使能SW数码管,bit_Select[2] 代表使能BW 数码管,bit_Select[3] 代表使能QW 数码管为了切换4 个段码的内容,定义数组ge_shi_bai_qian[4], 把GW 赋值给ge_shi_bai_qian[0], 把SW 赋值给ge_shi_bai_qian[1], 把BW 赋值给ge_shi_bai_qian[2],把QW 赋值给ge_shi_bai_qian[3]结合位码数组bit_Select[4] 的介绍,设置变量n 为切换变量,轮流显示4 个数码管,动态显示流程如图10 所示图 10 数码管动态显示输出程序3.5.3 程序动态显示输出程序调用方式1)主程序中循环调用子程序LED_Display( ),为了不影响显示效果,要求执行到LED_Display( ) 的周期<5 ms采用这种显示方式的显示子程序如下:1."n b tJ" 字符显示;2. 准备开始张力测量标识"_ _ _ _" 显示;3. 进入张力偏差判断标识". . . ." 显示;4. 张力合格标识"PASS" 显示2)定时中断动态显示:即在timer1 定时中断服务程序中调用显示子程序LED_Display( )在钢丝绳张力测量过程中,需要数码管实时显示张力值,但在执行张力采集子程序时,张力数据处理芯片HX711 的采样频率为10 Hz,也就是执行张力子程序的时间周期约为100 ms如果实时显示张力值继续采用在主程序中调用LED_Display( ) 这种显示方式,则数码管的扫描频率过大,将会严重影响显示效果故实时显示张力值应采用定时中断动态显示方式,但若采用这种方式,单片机CPU 在读取张力数据和角度数据时,会发生定时中断,影响采集数据的准确性为保证数码管显示效果,同时保证在读取张力和角度数据时,程序不被定时中断打断,应关闭定时中断而在单片机读完数据时,使能定时中断因单片机读取张力和角度值的时间很短,故不会影响数码管显示效果3.6 其他子程序为辅助完成张力计功能,还有CN 中断按键功能子程序张力计设置了开始测量、下一个、确定、结束测量4 个功能按钮这4 个功能按钮分别与dsPIC30F4012中具备CN 中断功能的I/O 口连接一旦某个功能键动作,dsPIC30F4012 立即发生CN 中断在CN 中断响应程序中置相应的按键标志变量为1,主程序中扫描相应的按键标志变量的状态,以响应并执行不同的功能和流程而数据中值平均化处理子程序主要是为准确获得初始空载张力值和初始张角值,减小数据波动,对初始空载张力值和初始张角值作中值平均化处理4 控制系统软件的实现为实现张力计的整体功能,开发了一种便捷式电梯钢丝绳张力计控制系统软件V1.0,该软件在MPLABIDE v7.5 环境中开发完成, 采用C 语言编写, 并由MPLAB C30 编译而成,实现了一种便捷式钢丝绳张力计能判断受测钢丝绳张力差是否超标的功能张力计整个工作流程如图11 所示图 11 张力计控制板工作流程5 结论控制系统软件基于模块化思想,把张力计整体功能模块分解成张力采集子模块、张角监测子模块、数据中值处理模块、偏差判断模块、CN 按键功能子模块等每个子模块的功能由一个函数实现,而在主程序main()中分别调用子功能模块函数,实现了张力计对张角、张力数据采集处理,判断张力差是否超标,并实现了显示、报警提示等相关人机交互功能该软件具有良好的可操作性、可移植性等功能特点,使测量人员通过简单的按钮操作,即可完成对电梯钢丝绳的张力测量参考文献[1] 尹苏东.基于GPRS 的电梯钢丝绳张力检测系统的设计与实现[D].上海: 东华大学,2011.[2] 王朋.提升机钢丝绳张力监测系统张力传感器与测力装置的研发 [D].邯郸:河北工程大学,2015.[3] 赵德栋,张庆丰.一种电梯钢丝绳张力计的工装结构设计及张角误差分析 [J].起重运输机械,2019(20):80-85.[4] 张庆丰,赵德栋,张铖宏,等.一种便捷式电梯钢丝绳张力计的设计 [J].起重运输机械,2019(5):105-111.[5] 黄鹏程.基于FPA 的气动柔性手指康复器及其控制系统[J].中国机械工程,2014,25(13):1 724-1 728.



0 评论