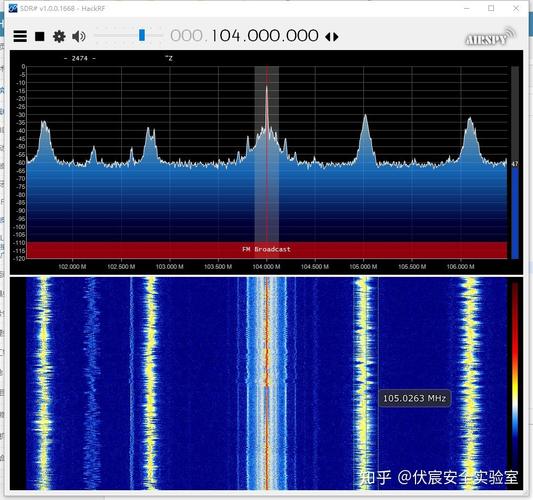
软件定义多普勒雷达与LimeSDR MiniDan Maloney KC1DJT在Hackaday上写了一篇关于Luigi Freitas PU2SPY的文章,他展示了即使是初学者也可以使用LimeSDR-Mini收发器在1 GHz以上的频谱中进行实验作者:Dan Maloney翻译:朱轶,BG5WKP想要探索雷达的世界,却被射频电子学的奥秘所震惊?通过本教程对软件定义雷达不再陌生,并能将复杂抽象射频的理论具象化从我们的[Gregory L. Charvat]那里获得灵感,他的许多雷达项目之前已经为我们的页面增添了光彩,[Luigi Freitas]在预算方面投入雷达,但学习机会丰富雷达组的前端几乎完全包含在LimeSDR Mini中,这是一种可以发送和接收的软件定义无线电设备唯一的附加组件是一对汤罐天线和接收方便宜的LNA系统的其余部分运行在Raspberry Pi上运行的GNU Radio Companion上;整个产品由USB电池组供电,并装在塑料手提包中 [Luigi]为2.4-GHz ISM频段设置了雷达,下面的视频显示它是以已知速度经过的车辆进行校准的没错,LimeSDR并不是很便宜,但它在价格方面做了很多工作,并降低了进入雷达领域的主要障碍 [Luigi]在记录他的工作和提供他的代码方面做得很好,这也有帮助LimeSDR Mini是开发逻辑密集型无线系统的理想选择,可用于中小批量生产,也可用于大规模生产的成本优化产品LimeSDR和LimeSDR Mini是同一系列软件定义无线电的成员一个不能取代另一个相反,它们是互补的简而言之,LimeSDR Mini是原始LimeSDR的更小,更便宜的版本然而,它仍然是一个打击 - 在其核心,LimeSDR Mini使用相同的LMS7002M无线电收发器作为其大兄弟 Mini有两个通道而不是四个通道,根据大众需求,SMA连接器代替微型U.FL连接器,并采用Intel的MAX 10 FPGA我们已经发运了数千个LimeSDR Mini板以及数千个更大的LimeSDR板这两者都建立在相同的供应链,开发工具和社区之上,使得软件定义的无线电比以往更容易访问功能和规格RF收发器:Lime Microsystems LMS7002MFPGA:Altera MAX10 (10M16SAU169C8G)169引脚FBGA封装16 K Les549 KB M9K内存2368 KB用户闪存4个分数锁相环(PLL)45 x 18×18位乘法器130 x通用输入/输出(GPIO)单电源电压Flash功能通过JTAG进行FPGA配置EEPROM存储器:2 x 128 KB,用于RF收发器MCU固件和数据闪存:1 x 4 MB闪存用于数据一般用户输入/输出:2个双色(红色+绿色)LED8 x FPGA GPIO引脚(3.3 V)连接:USB 3.0 Type-A(FTDI FT601控制器)2个同轴RF(SMA)连接器(每个都可以在高频段和低频段之间切换)用于外部时钟源的U.FL连接器FPGA GPIO接头FPGA JTAG连接器时钟系统:板载30.92 MHz VCTCXO可以使用板载DAC调整VCTCXO通过U.FL连接器输入外部时钟电路板尺寸:69 mm x 31.4 mm板重:20克使用LimeSDR Mini的软件定义多普勒雷达在这篇博文中,我将讨论我使用软件定义雷达的实验该概念意味着可以通过抽象模拟硬件来简化雷达系统,以支持在处理器模块内执行数字信号处理的软件实现这对航空航天应用很有用它降低了雷达系统的复杂性,从而减少了维护,重量和在飞行中出现行为不端的可能性在阅读完之后,我想知道是否有可能做出类似的事情来减少雷达系统所需的昂贵的模拟前端部件的数量这个版本的灵感来自Gregory L. Charvat设计的Coffee Can Radar这是一个很棒的雷达,可以做很多有趣的技巧,如FMCW和SAR Imagery与它们唯一的“问题”是前端所需的Mini-Circuits模拟设备它们是伟大的工程部件,但价格昂贵且往往难以获得,特别是来自欧洲或美国以外的地区如果我们可以使用软件定义雷达方法来减少所需的模拟模块数量,从而降低成本并简化组装和测试,那就太棒了考虑到这一点,我开始使用简单的雷达设计进行实验,并在我变得更加自信时进行扩展这篇博文将讨论称为连续波雷达的最简单的雷达,下一个将关于FMCW上图显示了此设备的工作原理模拟前端有三个主要部分,负责发送,接收和放大信号;数字前端,由能够在2.4 GHz同时发送和接收的软件定义无线电组成,在这里我使用了LimeSDR Mini;软件处理,所有计算都在这里进行,因为我使用的是开源软件GNURadio Companion,因为它具有交互性和易用性每台计算机都应该处理这种雷达所需的采样率保留了2.4 GHz的基频,因为大多数SDR可以在没有上变频器的情况下以此频率进行发送和接收此外,该频率在ISM频带内,意味着用户不必担心干扰其他服务免责声明:在传输任何射频之前,请务必查看当地法律使用此频率也存在缺点,例如,对802.11无线路由器的干扰以及墙壁等密集材料中的不良传播在下面的章节中,我将详细解释每个雷达模块及其在现实世界中的表现对于如此简单的雷达,总体结果优于预期但首先,请记住连续波多普勒雷达究竟是什么......连续波多普勒雷达单频连续波雷达是一种非常简单的雷达它们相对便宜且易于制造,事实上,它们甚至用于儿童玩具和运动传感器它们用于确定移动目标的速度这是可能的,因为雷达将以固定频率向载体传输载波,该载波将运动中的一些发射波反射回雷达与原始信号相比,接收波将具有相移该相移的变化率称为多普勒频移此效果以Hz为单位测量,并且与目标的速度成比例直观地说,由于没有多普勒频移,它将无法测量静止目标的距离该项目用于测量目标速度的公式可以从下面所述的多普勒频移效应公式得出 这里没有必要使用爱因斯坦的狭义相对论,因为两个目标都在同一参照系中模拟前端该模拟模块负责发射和接收该雷达所需的两个信号第一个是由朝向目标辐射的数字前端产生的载波,第二个是来自包含多普勒频移的目标的散射波由于软件定义雷达概念,这是此构建中最简单和最便宜的部分此处使用的大多数组件可由用户制作或从中国购买这种雷达的主要部分是这两个“天线”这是一个由锡罐制成的定向天线,其直径和波导与其要接收或传输的无线电波的波长成比例它们很受业余无线电爱好者的欢迎,因为它们易于制造并具有出色的性能这个2.4 GHz天线的组件长度可以在这里找到这种简单的前端设计缺少功率放大器,因此,传输功率将受到下一个模块中使用的SDR的限制,从而限制了最大范围为了获得更好的效果,可以使用商用定向天线,如喇叭天线或贴片天线这对于未来的项目非常有用,因为制造商提供辐射模式和增益等所有技术信息模拟前端的第二部分是接收器的低噪声放大器在这里,我使用的是宽带SPF5189,它具有出色的性能和低噪声系数它们非常容易获得且价格低廉这是必要的,因为来自目标的散射信号非常微弱,这个放大器将有助于增加SNR该LNA通过输入(IN)端口连接到接收天线(RXA)数字前端该模块是该雷达的重要组成部分它是软件和硬件之间的桥梁来自目标的散射信号被数字化以便稍后处理并产生要发送的信号所有信号都通过USB连接发送到计算机软件或从计算机软件接收这是迄今为止该设备中最昂贵的模块它将需要能够同时发送(TX)和接收(RX)的软件定义无线电,这一功能称为全双工这些无线电的成本可能从数百美元到数千美元不等在这里,我使用的是LimeSDR Mini(CrowdSupply的售价159美元),非常适合此类研究LimeSDR Mini设备是LimeSDR USB的小兄弟,具有或多或少的一半容量它提供高达30.72 msps带宽的信号的全双工传输和接收它还提供12位ADC分辨率和10 MHz至3.5 GHz的频率范围由于这是一种高带宽无线电,因此主机和USB 3.0芯片组需要管理大量数据才能获得流畅的体验还建议使用基于Linux的操作系统幸运的是,该项目的雷达类型仅使用4 msps的带宽,因此每台计算机都应该维护此数据流使用LimeSDR,数字和模拟前端之间的连接非常简单发射天线(TXA)直接连接到SDR的TX端口,低噪声放大器的输出(OUT)连接到RX端口,如下所示软件处理出于简单性和兼容性的原因,这种雷达是用开源软件GNU Radio Companion实现的它提供了一个出色的多操作系统平台,用于原型化数字信号处理工作流程,这些工作流程非常易于定制这个项目的GitHub存储库拥有开始使用这种雷达所需的一切其他雷达将在开发时添加在不久的将来,我计划开发专门为雷达应用而设计的定制开源软件该软件可以开发更复杂的软件定义雷达,并大大减少这些计算的开销为了重现本文第二部分描述的理论,雷达需要传输2.4 GHz的载波该波的产生由信号源块处理下表中的参数将产生比SDR传输频率高1 kHz的余弦波,采样率为2 msps下一步是使用SDR发送生成的载波并接收散射信号这可以通过支持几乎所有无线电的内置gr-osmocom块来完成如果项目使用LimeSDR,gr-limesdr块是首选,因为它们更稳定,并提供更广泛的设置传输块直接与信号源块连接,接收块的输出连接到自动增益控制块,以匹配载波的幅度如果一切正常,传输(红色)和接收(蓝色)实际信号应具有相同的频率和幅度,它们之间存在相位差,如下图所示 如果接收到的信号有噪声或与余弦波无法区分,请检查LNA和天线是否正常工作 由于雷达使用的频率与WiFi路由器和其他ISM设备相同,因此会出现一些偶然的噪音然后,这两个波通过模拟混频器(Multiply Conjugate Block)的数字对应物混合在一起顾名思义,该块将两个信号相乘并共轭,产生第三个信号,该信号等于在天线辐射图内移动的所有物体产生的多个多普勒频移的分量由于发射和接收信号的幅度和其他缺陷不完全相等,因此一些残余载波也应该是可见的由于2.4 GHz信号的多普勒频移对于地面速度来说很小,因此需要将混频器输出重新采样到较低的采样率要存档,Multiply Conjugate Block连接到Low Pass Filter Block输入该块将对2 msps进行抽取和滤波2048次,得到2.441 ksps信号如下所示,生成的FFT图具有在多普勒频移的中心和两侧发送的载波该频域可视化还允许识别所有多普勒频移分量这意味着可以同时识别多个目标测试为了验证雷达是否真的有效,我在天线前面用风扇进行了室内测试由于风扇的叶片是倾斜的,因此圆形运动产生雷达可以检测到的线性运动利用理想的采样率,这个速度分量就像一个锯齿波,但由于它们以高速旋转,这个雷达没有时间分辨率来测量它们该测试在频谱图中产生了非常清晰的速度线除了速度之外,还可以在发生速度变化时看到加速度变化下一个实验是测量车辆的速度在第一次尝试时,雷达被放在人行道的一侧,并指向运动中的汽车来自低通滤波器块的所得复合流被记录在磁盘上此数据后来被Python脚本转换为下面的频谱图使用连续波多普勒雷达的最后一个等式将以Hz为单位测量的多普勒频移转换为km / h通过该街道的所有12辆车的速度可以在用S形垂直线表示的频谱图中看到当车辆驶向雷达时速度为负,而当车辆离开时速度为负还有一些较小的垂直线,归因于路过的行人由于一切都按预期工作,测试进展到更具挑战性的事情这次,雷达定位在距离高度为45度的高速公路50米处,如下图所示一些计划外的不利条件,如雷达前的高杂草和使Raspberry Pi多次自动关闭的极端高温,可能会对结果产生更坏的影响数据处理就像上一次测试一样生成的频谱图显示与上次测试类似的结果经过道路的车辆引起多普勒频移,可以看作靠近中心的S形垂直线距离路边最长的距离有助于产生更锐利的S曲线,因为雷达有更多时间对每辆车进行采样雷达记录的最高速度约为78公里/小时,低于该位置80公里/小时的速度限制最后一次实验是为了确保雷达测量的速度正确这次汽车将以固定的速度通过雷达前方如果汽车速度表的速度与雷达测量的速度相匹配,则可以验证结果这辆车以10公里/小时,30公里/小时和60公里/小时的增量速度进行了三次通过此测试可在下面的视频中看到注意,FFT视图显示了与频移相关的信号幅度为了简化分析过程,生成的谱图具有从频率到速度的自动转换结果表明,该车在每次通过时确实处于正确的速度,分别为9.3 km / h,28.8 km / h和56.0 km / h快速注意:我没有太多时间用这种雷达进行更多实验但在接下来的博客文章中,我将探讨此类雷达的更多应用结论正如我们在上面的测试中所看到的,这个项目对于这种简约的方法有很好的结果我们看到软件定义雷达概念可以在业余水平上以实惠的价格构建,而无需昂贵的无线电和复杂的模拟设备当然,这还没有为任何严肃的目的做好准备,但对于有兴趣了解雷达系统如何运作的人来说,它可能是一个很好的起点开发和了解该理论在实践中的运作方式很有趣它还激励我建立另一种基于软件处理的更先进的雷达在Twitter上关注我以获取有关我的项目的最新更新此博客还有一个RSS Feed可用于您首选的RSS应用程序


0 评论