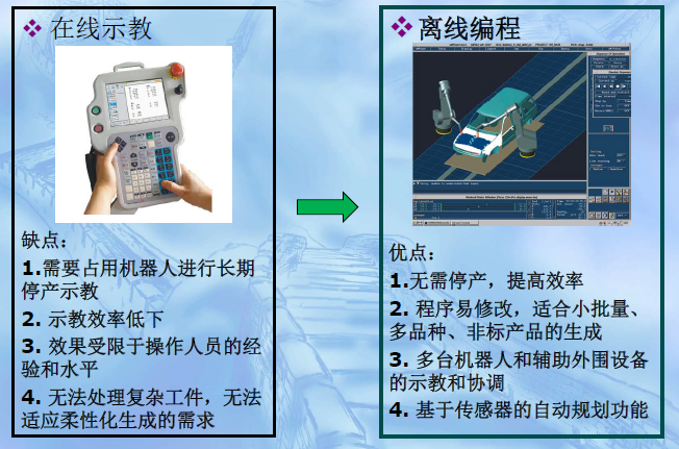
文 | 伯朗特机器人早期的机器人通常采用简单的固定程序,执行一些简单且重复的动作任务这些程序大多是基于特定工作而开发,专用性强随着机器人应用领域的不断扩展,它们已经能够胜任多样化的工作,不再局限于单一任务,展现出更好的通用性因此,机器人程序设计变得日益重要,机器人编程技术也迎来了快速发展,出现了多种编程方式和编程语言目前,工业机器人的编程方式主要分为以下三种:1.示教编程示教编程是最常见的简单机器人编程方式,尤其适用于简单的重复性工作任务示教过程中,工作人员需要在机器人现场操作,将机器人的末端执行器移动到目标位置,机器人的关节角度值会被存储在控制器中,从而“记住”目标位置在复现阶段,机器人能够从控制器读取存储的位置信息,再现示教时的运动轨迹示教方式包括手把手示教和示教器示教手把手示教通过操作机器人手臂上的操作杆完成动作,而示教器示教则是通过示教器上的旋钮来驱动机器人示教器示教因其操作简便,成为工业机器人编程的常见方式示教器上的旋钮对应机器人的各个关节,使得操作者能在不同的坐标系下方便地完成示教示教编程的优点在于操作简单、易于上手,示教速度快然而,它也存在一些缺点:必须现场完成,占用机器人的生产时间精确或复杂的轨迹难以通过示教实现传感信息无法与示教融合,限制了自动化程度难以与机器人的其他操作同步2.机器人语言编程机器人语言编程使用专用的机器人语言来描述机器人的动作轨迹这种方式类似于高级编程语言,能够实现机器人之间、以及机器人与外部设备之间的互联,完成多样化任务机器人语言种类繁多,不同的机器人系统可能使用相同的语言,也可能使用不同的语言3.离线编程离线编程通过特定软件实现,允许在不直接连接机器人的情况下进行编程离线编程软件通常还具备轨迹仿真、碰撞检测、末端执行器建模与导入、在线调试等功能这种方式可以在不影响生产的情况下完成编程和仿真,显著提高效率举例辅助理解:假设我们有一家汽车制造厂,需要使用机器人来完成汽车零部件的装配工作示教编程场景:装配线上的机器人需要将发动机放入汽车底盘操作:1.工程师站在装配线旁,手持示教器2.通过示教器,工程师手动引导机器人的手臂移动到发动机的正确位置3.机器人记录下这个位置和相应的关节角度4.工程师重复引导机器人到装配位置,机器人再次记录5.一旦示教完成,机器人能够自动重复这一动作,将发动机放入底盘优点:操作简单,快速上手缺点:需要工程师亲自在场,对复杂动作的编程可能不够精确机器人语言编程场景:机器人需要根据不同类型的汽车底盘调整装配动作操作:1.程序员编写一个程序,使用特定的机器人语言来定义发动机装配的步骤2.程序中包含逻辑判断,根据不同底盘类型选择不同的装配策略3.程序通过机器人控制器上传到机器人4.机器人根据程序指令执行装配任务优点:可以编写复杂的逻辑,适应多变的任务缺点:需要专业的编程知识,开发周期可能较长离线编程场景:新车型即将上线,需要对机器人进行重新编程以适应新装配流程操作:1.使用离线编程软件,在计算机上模拟装配流程2.软件允许工程师设计新的装配路径,并进行仿真测试,确保没有碰撞或错误3.完成设计后,工程师将程序导出并通过USB等接口上传到机器人控制器4.机器人在实际装配前,已经在软件中完成了编程和测试优点:可以在不影响生产线的情况下进行编程和测试,提高效率缺点:需要额外的软件和硬件支持结语通过这个案例,我们可以看到每种编程方式都有其适用的场景和优缺点示教编程适合简单、重复的任务;机器人语言编程适合需要复杂逻辑的任务;而离线编程则适合在不影响生产的情况下进行复杂的编程和测试实际应用中,根据具体需求选择合适的编程方式是非常重要的通过这三种编程方式,工业机器人能够更好地适应多样化的作业需求,提高生产效率和灵活性随着技术的不断进步,未来的机器人编程将更加智能化和自动化



0 评论