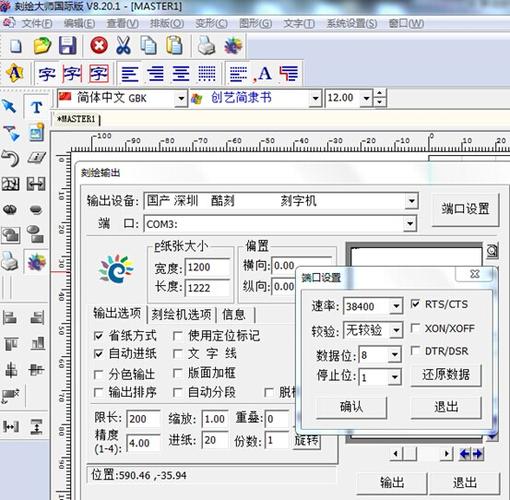
前面几篇文章详细讲述了机架,电路等部分,现在万事俱备,只欠东风了.首先下载软件Candle,私信我,发送\"candle\",即可获取下载地址.或者直接在github上搜索也可以.软件不用安装,即下即用,按下图提示打开软件.然后连接arduino连接电脑Candle软件界面如下Candle界面如果图箭头位置显示\"idle\",表示连接成功,当前状态为\"空闲\",下面重点来了,参数设置,请认真阅读,设置参数在软件右下角输入\"$$\"(按shifit+4),点右边的飞机图标,查看参数默认值显示参数这里我只说几必需设置的参数,其它没有说到的默认即可.设置方法 $参数 = 值 ,点飞机图标,即可设置对应的参数值.方向设置$3 步进电机方向,点击软件上的方向键,移动XYZ轴,step选项值尽量小些,避免撞车控制方向
值 | Mask | 反转X轴 | 反转Y轴 | 反转Z轴 | 000000000NNN100000001YNN200000010NYN300000011YYN400000100NNY500000101YNY600000110NYY700000111YYY下面一张图说明方向键对应的移动方向,如果方向与图中不一致,设置$3=值,正面举个例子,X轴方向相反,设置$3=1;XY轴都相反,设置$3=3;Y轴方向相反,设置$3=2;注意:Y轴的移动方向与按键相反的(由于是物体在运动)方向与按键脉冲设置$100 X轴脉冲设置$101 Y轴脉冲设置$102 Z轴脉冲设置计算公式: 360/步距角 X 细分 / 导程步距角:步进电机转动的最小角度,我这里使用的步进电机步距角是1.8度。细分 :步进电机驱动中设置的细分值,我这里设置的细分是16。导程:丝杆转动一圈移动的距离。我这里XY丝杆导程是8mm,Z丝杆导程是4mm。计算结果:X 360/1.816/8=400Y 360/1.816/8=400Z 360/1.816/4=800将结果分别设置$100=400;$101=400;$102=800。最后给大家来个测试文件,私信发送\"雕刻机\"获取刀路文件设置完上面两参数后,机器就能正常使用了。如果您还想了解其它参数的设置及意义,私信我发送“雕刻机”,即可获取详细资料。如果你还不了解雕刻机电路的连接,点此了解详情如果你机械部分也有问题,点此解惑


0 评论