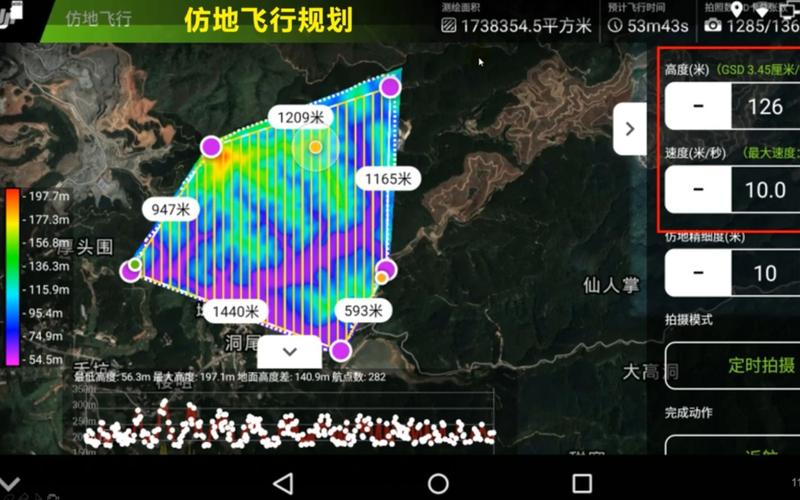
建图航拍任务和倾斜摄影任务的设置基本相同。如无特殊注明,以下描述均适用于这两类任务。对于倾斜摄影任务,可分别设置下视航线和倾斜航线的某些参数,如重叠率、飞行速度。设置时,点击地图界面上的数字1-5可预览各个航线,1表示下视航线,2-5分别表示四个不同方向上的倾斜航线。
基础设置1.实时二维(仅适用于建图航拍任务)若开启,则飞行器执行任务时会实时将拍摄的照片进行处理,在地图上显示建图结果,但此建图结果精度较低。结束任务后,用户仍可将拍摄的照片原片导入大疆智图进行较高精度的建图。若关闭,则无实时建图结果。2.实时三维此为付费功能,用户需购买并激活许可证方可使用。若开启,则飞行器执行任务时会实时将拍摄的照片进行处理,在地图上显示三维点云结果。结束任务后,用户仍可将拍摄的照片原片导入大疆智图进行更高精度的三维模型重建。默认实时三维结果为点云+模型,用户可取消勾选模型选项。若关闭,则无实时三维点云/模型结果。3.建图场景(仅适用于建图航拍任务)用户根据建图航拍任务所要拍摄的场景进行选择,包括农田场景和城市场景。农田场景适用于农田等空旷、高度差较小的区域,城市场景适用于多建筑区域。城市场景为专业版及更高版本功能,用户需购买并激活许可证方可使用。购买和激活详见更多功能。4.完成动作飞行任务完成时飞行器所执行的动作。悬停:任务完成后将悬停在最后的航点处,用户进行后续的飞行控制。自动返航:当执行任务时的飞行高度高于设定的返航高度时,任务完成后将直接以当前飞行高度自动返航。当飞行高度低于设定的返航高度时,任务完成后将先上升至设定的返航高度,再飞回返航点。返航高度可在飞行控制中进行设置。原地降落:任务完成后将在最后的航点处自动下降至地面并自行关闭电机。5.GSD地面采样距离(GroundSampleDistance)。此数值为采集的原始影像中每个像素代表的实际地面距离,由大疆智图根据飞行高度和相机型号自动计算。6.任务高度飞行器执行任务时相对于所拍摄场景的高度。7.飞行速度/飞行速度(下视)/飞行速度(倾斜)飞行器执行任务时自动飞行的速度。但飞行器在航线以外飞行时的速度(例如开始执行任务时,从飞行器位置飞至航线起始点时的速度,或任务完成后返回时的速度),均为13m/s,用户不可更改。对于倾斜摄影任务,飞行速度(下视)对应下视航线上的速度,飞行速度(倾斜)对应倾斜航线上的速度。8.最大速度大疆智图根据飞行高度、相机型号和高级设置中的参数计算出能够满足拍照要求的最大飞行速度。用户可以点击设置将飞行速度设置为此最大速度。9.选择执行航线(仅适用于倾斜摄影任务)从五条航线中勾选需要执行的航线,未勾选的航线将不会被执行。



0 评论