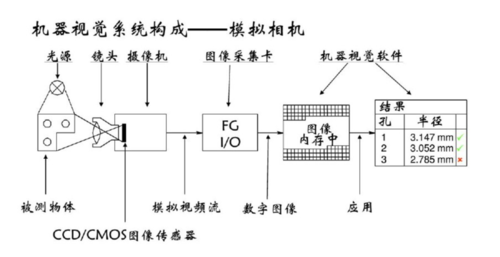
关于机器人工业相机视觉原理讲解 机器视觉是人工智能重要分支,机器视觉在应用上具有广泛性,能 够在智能制造,以及众多智能生活领域展开应用;在技术上具有独特性, 是唯一非接触式识别、测量物体的前沿技术,在工业生产中为了减少人力 成本和提高效率,一般会引用工业视觉相机(CCD)来测量和识别 1. 工业视觉原理介绍 使用一种高感光度的半导体材料制成,能把光线转变成电荷,通过模数转换器片 转换成数字信号,数字信号经过压缩以后由相机内部的闪速存储器或内置硬盘卡保存, 因而可以轻而易举地把数据传输给计算机,并借助于计算机的处理手段,根据需要和 想像来修改图像1.1 工业视觉用于识别 1.1.1 用于识别时的注意事项 注:用于识别时,被拍摄物体特征点必须清晰,明暗对比度层次分明 1.1.2 用于识别时对相机的要求 注:用于识别,对相机要求一般就可以,不需要很高像素相机,主要能满足特 征点识别就行1.2 工业相机用于定位 1.2.1 用于定位时视觉原理 注:在一个固有的平面图像内,某一个特征点一定存在某一个独一的像素位置 向量,我们把这个像素位置向量叫做在图形里的像素坐标(Pix , Piy) 1.2.2 用于定位时的图像误差 注:由于被拍摄物体在像面区域成像时,图像是通过小孔成像原理成像,为了 更好的得到像面效果,会采用加装镜头(镜头有凹凸镜和凸凸镜),因此 像面会在成像的时候出现一定程度的畸变 一,缩放畸变 注:如果镜头凹凸镜,则像面呈现缩放畸变 二,缩拉伸畸变 注:如果镜头凸凸镜,则像面呈现拉伸畸变 1.2.3 图像中目标点像素位置介绍 注:物体的某一个特征点,在成像区域内势必有一个独一的像素位置,这 一个特征点的中心位置所对应图像像素位置就是这个点像素坐标位置 1.2.4 目标点实际的机器人物理位置介绍 注:所谓的物理位置就是,物体的某一个特征点,在机器人的某一个 工具下尖端对准该特征点时的机器人的坐标 1.2.5 像素位置与物理位置存在的比例关系 注:此时,同一个特征点在图像中的位和在机器人坐标系下的位置势 必存在某种比例关系,我们把这个关系称之为比例因子 平移向量关系 注:在同一个成像区域内,一个点一定可以通过另一个点平移某个量得到(如下图) 注意:在 XY 直角坐标系中 ,特征点 A(特征点 1) 和特征点 B(特征点 2) 之间连线的中点 为 P1 点 ( x , y ) 旋转角度 b 后得到 P2 点(x1 , y1) 旋转向量关系 注:在在同一个成像区域内,两个中心相同的特征点一定可通过旋转某一个量得到(如下图)注意:在 XY 直角坐标系中 ,特征点 A(特征点 1) 和特征点 B(特征点 2) 之间连线的中点 为 P1 点 ( x , y ) 旋转角度 b 后得到 P2 点(x1 , y1) 平移+旋转向量关系 注:在在同一个成像区域内,两个中心相同的特征点一定可通过旋转某一个量得到(如下图)注意:在 XY 直角坐标系中 ,特征点 A(特征点 1) 和特征点 B(特征点 2) 之间连线的中 点为 P1 点 ( x , y ) 平移向量 a 和旋转角度 b 后得到 P2 点(x1 , y1) 原创:91工控阳屹培





0 评论