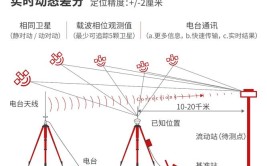
杨浩摘要《全站仪任意网测量2023》软件系统可以平差处理所有迄今为止的60多种控制网,及其附加已知条件、秩亏网、拟稳网、稳健估计、岭估计、概算、抵偿投影变形、粗差处理、三角高程网等,有这一款软件就足够了。本软件是工作过程高度AI智能化的,很多工作及高难度逻辑已不再需要用户考虑,因此软件界面少,使用简单,只要提交外业原始观测数据文件将自动化识别控制网类型进行平差处理并给出各种表格化总体成果报告,省事省心省力。手机、电脑打开闪速工作网www.ldcmm.com即可使用,方便快捷。另外,本软件尤其适应于困难的控制测量定点工作。用户只要掌握对每一个未知点的平面独立观测条件不少于2个即可,这使得外业工作很省心。本软件有可运行范例供试用。利用本软件系统还可以建立“工程定位系统(Engineering Position System,简称EPS)”。关键词:控制网,测量平差主要功能《全站仪任意网测量2023》软件系统实现了AI技术,并使得测量平差工作高度AI智能化。即,本软件系统不仅解决专业问题,更重要的是实现了整个有关平差工作过程的智能化,测绘人员只要提交全站仪原始观测数据文件,不论是什么样的控制测量类型,如各种控制网、导线、锁、交会等等,该系统都能自动识别进行平差处理并给出总体成果报告,自动圆满完成工作。因此,测绘专业的同行们再也不用到处找平差软件了,这一个就够了,并且由于本软件实现了高度AI智能化,这使得软件操作也很简单。本软件把全站仪外业定点测量统一看作网,可以满足迄今为止的几乎所有控制测量及精度等级。即,满足包括所有的控制网(三角网、测角网、测边网、边角网以及三角高程网等)、所有的导线网及导线、三角锁、典型图形等的严密平差以及所有的交会计算。还能够满足未来新产生的各种控制测量方案及精度等级。本软件适合一、二、三、四等及五等以下各等级的平面控制网平差处理,其中还包括附加已知条件的控制网平差、秩亏网平差、拟稳网平差、稳健估计、岭估计、概算、抵偿投影变形和粗差处理等。同时也进行三角高程网平差计算。本软件只需要提交统一简洁的输入数据之间相互独立的原始观测数据文件,其中只有必须的观测数据和已知数据,没有需要用户计算和统计的数据等,容易掌握。由于本软件实现了智能化,因此界面数量大大减少、界面上的元素少而简洁、操作设置简单,一般情况下用户只需打开浏览器、提交观测数据文件,然后浏览打印获得的各种成果报告。电脑、手机(APP)、虚拟机及全站仪等均可网上操作使用。不需要安装、不存在卸载、不留垃圾信息。本软件具有良好的数据保密性。除平差计算外,本软件还自动完成大量工作内容。凡是计算机能做的事情都交给计算机去做,尽力减轻用户劳动负担,大幅度提高工作效率、降低劳动强度。对于四等以下的平差项目,大多数使用缺省设置就可以了,这时只需要提交数据文件即可得到全部成果。软件系统简介1 运行本软件的软、硬件环境本软件分网络版和单机版。1、网络版又分为互联网版和局域网版。互联网版适合任何人在任何地点网上使用,局域网版适合于公司、单位使用。本软件的互联网版适合多种主流浏览器,最好使用等同于IE10.0以上版本。电脑、手机、虚拟机及全站仪等均可网上操作使用,不需要安装、不存在卸载。电脑屏幕大、操作方便,推荐。2、单机版又分为浏览器版和窗体版。适合单台电脑、全站仪和虚拟机使用。虚拟机的使用主要适合于密级较高的单位和个人使用。全站仪种类多,数据文件格式不统一,可以分别用高级程序语言编写一段转换程序转为本软件的统一数据文件格式。本软件目前准备发布互联网版,其它版本暂不发布。2 概述《全站仪任意网测量》(简称任意网)软件系统把全站仪外业定点测量统一看作网。最简单的网是由两个已知点和一个所求点构成的一测站支导线,复杂网无限制。本软件适合一、二、三、四等以及五等以下各等级平面控制网平差处理,其中还包括附加已知条件的控制网平差、秩亏网平差、拟稳网平差、稳健估计、岭估计、概算、抵偿投影变形和粗差处理等。同时也进行三角高程网平差计算。可以满足各种交会、导线、锁、网(包括测角网、测边网、边角网、导线网等)、典型图形以及一些特殊的和困难的测量定点工作。除平差计算外,本软件还会自动完成大量工作内容。凡是计算机能做的事情都交给计算机去做,以尽力减轻用户劳动负担,提高工作效率。具有统一简洁的观测数据文件格式(可以是文本文件或Word表格或Excel表格),而不论控制网有多复杂,数据文件格式都是统一的,其中只包含必须的观测数据和已知数据,不需要用户计算和统计的数据等。本软件允许在同一设站上有半测回、一测回及多测回的任意测回混合观测,还允许测回内的一些方向不观测,以满足不同精度的定点需要。利用本软件,外业可同时进行控制测量和碎步点同测,在一个测站上把需要做的外业工作做完,可以不需要先控制后碎步分开观测,以减少重复性劳动。用户提交数据文件后,在网络正常的情况下一般十几秒钟左右便可得到结果。系统经过一系列运算处理后向用户推送各种成果网页、图文结合、自动生成各项成果报告,用户只需浏览、打印或复制、下载即可。本软件具有良好的数据保密性。如果存在观测粗差,本软件将会探测出可能携带粗差的具体观测值范围。本软件允许控制网中的已知点之间互不通视。允许已知条件之间任意分散,即如互不相邻、互相独立、互不相关等。本软件,概算趋近次数为3次。平差迭代次数最高为20次。迭代未知数修正值之最大绝对值小于实地0.0001m时迭代正常完成,否则将会给出提示。本软件的一个显示特点是力争工作过程的高度自动化和智能化。本软件适合于生产、科研与教学使用。3 用户需要做的工作(1)用户只需把观测数据文件整理好,争取一次提交成功。(2)用户只要掌握对每一个未知点的平面独立观测条件不少于2个即可。这可称为基本观测条件。但,整个控制网要有一定数量的多余观测条件才能达到平差的目的。例如,一个未知点的交会至少要有一个多余观测条件。多余观测条件的多少要根据控制网的精度要求、技术文件要求、实际用途、重要程度等因素适量确定。(3)操作步骤: 设置 → 选项 →提交数据文件 → 浏览成果(各种成果项参见主要页面介绍和平差例子录像)。对于四等以下的平差项目,大多数使用缺省设置就可以了,这时只需要提交数据文件即可得到所有成果。(4)错误检查方面。虽然本软件能够自动检查出大量错误并反馈给用户修改数据文件,但用户应该主动检查并消灭数据文件中的所有错误,力争一次提交成功。把本软件的自动检查作为最后的补充检查,以帮助用户发现比较隐蔽的错误之用。4 用户不需要关心的工作除“用户需要做的工作”之外都是用户不需要关心的工作。如,用户不需要关心坐标高程如何计算、三角形及点、边和角的编号、顺序、相互关系与数量等、导线点的连接方向和顺序、何种网型以及网的复杂程度等等。本软件的后台机器人功能(人工智能)将会自动完成上述这些工作,但不限于这些工作,这里不一一列举。总之,对于控制网中的复杂逻辑,由本软件负责处理。我们仍在不断努力,让用户的工作越来越少、负担越来越轻。给用户创造一种轻松快捷的工作环境。5 应用前景本软件可广泛应用于规划、勘察、工程设计与施工阶段的测量定点、平差计算、变形监测等。也可以应用于其它重要领域。能够对遥远的目标进行定位(遥远是指用望远设备观察到的最远目标)。本软件系统存在潜在应用。如果用全站仪配合GPS工作将会使得本软件系统发挥更大、更重要的作用。本软件尤其可以对不可到达、或难以到达、或达到代价过高过大的目标进行观测以获取精确的坐标和高程。并且更适合于采用其它设备进行定点、建网困难较大、经费消耗太高的项目。更重要的是本软件系统实现了工作过程的高度自动化和智能化,以大幅度减少人力资源投入、大幅度减轻工作人员的劳动强度。对于一个具体的大中型工程项目,若利用本软件系统对工作方案布置设计得当,可以大大减少测量专业人员的投入人数,并实现高速、高效完成规划勘察、设计和长期施工观测方面的有关生产任务。利用本软件能够解决用传统方法难以解决的问题。例如,对存在巨大障碍甚至通视障碍(如大型河流相隔、崇山峻岭阻挡等)的目标以最少的代价进行精确的观测定位。本软件系统并不局限于上述应用。本软件适合现有的观测方案和未来的观测方案。现有的控制网观测方案包括目前已有的各种交会、各类导线网、测角网、测边网、边角网、各类控制网及典型图形等以及概述中所提到的各种方案。未来的观测方案是具有一定的创造性以解决一些特殊的技术问题。这便是任意网的特征。有些任意网,从形式看可能很复杂,但却使得工作人员的实际劳动时间缩短、劳动强度降低、生产经费降低等。构造任意网的目的是为了工作更省时省心,并且同样满足总的精度要求和质量要求。往往构造更复杂的任意网是为了换取更容易的设计和实际工作的开展、更节省经费和总的资源消耗,其复杂的逻辑交由本软件系统去完成分析、判断和数据处理以及向用户推送成果。不论多么复杂的任意网,其观测数据文件的形式都是统一的和简洁的。关于以上这些,需要用户在实际应用中进一步了解。因为任意网是随人的意志顺其自然而产生,不需要花费太大的精力,而只需掌握对每一个未知点的平面独立观测条件不少于2个、同时满足技术文件所规定的要求(如必要的测回数、必须观测的目标、规范规定的要求等)即可。另外,对于重要的工程部位,为了进一步提高精度和可靠性,可以在基本观测条件的基础上适当增加若干容易获取的独立观测条件。但,对于一般性的测量区域只要在基本观测条件的基础上包含有一定数量的检查条件就可以了,例如多后视支导线。关于容易取得的观测值,例如对具有明显标志的目标进行方向观测就很容易,瞄准目标后记录读数就可以了。因此,凡是容易瞄准观测方向的目标应该尽可能的观测,因为方向观测很容易取得高质量观测值,即精确瞄准目标按下记录键。只要这些目标能起到良好的控制作用,目标自然明显都可以充分利用。但,对于取得比较困难的观测值,除非为了满足基本观测条件和技术文件要求,一般不建议多余观测。增加多余独立观测条件应本着先易后难的原则,对容易观测的目标所取得的观测值数量已经满足控制网精度及可靠性要求以后,就不再去考虑那些观测代价高的目标了。增加独立观测条件对于提升整个网的精度是明显的,但过多的多余观测却是一种浪费。可以在控制网工作过程中多次试运行本软件,通过查看日志文件,以了解当前的工作情况、把握工作进度、避免过多的多余观测,以免造成人员和资源浪费等。6 关于“全站仪”一词所涉及的仪器设备范围目前建立测角测距控制网以及定点的主流测量仪器是全站仪。但,本软件所指“全站仪”是这类仪器设备的统一代称。其主要包括经纬仪、测距仪、合体经纬仪测距仪、全站仪以及未来的新型测角测距仪器设备。凡是具有测角测距功能的仪器设备都适用于本软件系统,使用这些仪器设备得到的统一观测数据文件都可以提交本软件系统进行同样的处理。主要页面《全站仪任意网测量》软件系统主要涉及以下三个页面:主页面、设置页面、成果页面。即,在主页面提交数据文件,成果页面包含了所有成果报告。一般情况下,需要设置的内容很少。大多数平差项目使用缺省设置即可。1、主页面2、设置页面3、成果页面范例请首先看: 观测数据文件格式模板 概算参数文件模板 气象参数文件模板复制下列观测数据保存在一个文本文件中,文件名随便起,比如“abc1.txt”。然后运行“全站仪任意网测量”软件,使用“缺省”设置→浏览到“abc1.txt”打开→提交,即可得到大量成果。本文后面将摘录几个主要成果页面。2 2 1.2 2.0=====================PJ2 35076.4533 74380.9467 551.5715PJ3 34519.7613 72778.8718 520.4561=====================PJ3 1.523PJ7 1600.805 103.12243 90.13112 2.331PJ2 / 70.50204 88.52478 3.621PJ2 1.557PJ12 692.9902 28.49196 105.00018 2.335PJ3 / 250.50204 91.06255 0.232PJ1 1767.121 91.32560 91.07527 6.442PJ14 802.2397 314.27105 99.04565 3.112PJ8 1169.143 144.46526 88.10068 2.336PJ7 1.551PJ13 1483.119 80.39444 87.18278 3.695PJ8 718.5787 92.36407 84.00135 2.336PJ3 / 283.12243 89.48392 0.232PJ8 1.533PJ2 / 324.46526 91.42004 3.621PJ7 / 272.36407 95.52368 2.331PJ13 794.17 69.51544 90.21029 3.695PJ11 1.562PJ7 2258.726 89.07502 89.54301 2.331PJ3 806.2258 60.15184 89.23227 0.232PJ4 1706.725 43.27003 89.06074 5.213PJ9 1772.114 22.20452 91.25102 5.251PJ9 1.601PJ3 1239.316 178.47112 87.25059 0.232PJ12 1963.828 92.11427 92.50172 2.335PJ10 1398.362 100.58119 88.32554 1.003PJ10 1.481PJ3 1661.276 234.09022 89.19067 0.232PJ12 619.7066 72.03376 102.07374 2.335PJ12 1.488PJ2 / 208.49196 74.46486 3.621PJ9 / 272.11427 87.02463 5.251PJ13 1.478PJ8 / 249.51544 89.26149 2.336PJ5 1068.388 315.51086 91.48440 4.216PJ1 1.478PJ2 / 271.32560 88.39165 3.621PJ13 722.5512 208.39536 84.21044 3.695PJ12 1575.007 294.34139 95.18090 2.335部分成果摘录如下:基本信息
1、控制网计算基本信息 测距仪固定误差 ±2mm 测距仪比例误差 2ppm 一方向水平角中误差 ±1.2″ 一方向垂直角中误差 ±2.0″ 观测边数 20条 观测方向 29个 最小观测边长 619.7066m 最大观测边长 2258.7260m 平均观测边长 1291.0196m 观测边总长度 25820.3922m 设站数 10个 已知点数 2个 未知平差点数 11个 未参与平差的点数 平面多余观测条件数 17个 垂直角多余观测条件数 16个 大气遮光系数 0.14 2、用到的已知控制点 平面点或平高点 PJ3、PJ2 高程点 3、平差结果精度指标 平面单位权中误差 ±1.95″ 最大点位误差 ±2.05cm 最大相对点位误差 ±1.28cm 三角高程单位权中误差 ±4.58cm 缺省计量单位说明 ①长度单位:m;角度单位格式:度.分秒(°. ′ ″) ②精度单位:长度为cm;角度为秒(″) 计算时间 2022/11/5 20:22:26平差坐标
未知点名Nx(m)Ey(m)H(m)平面类型高程类型备注PJ734154.048174337.3484513.6291平差点平差点PJ1235683.596174715.0213365.1815平差点平差点PJ135028.690376147.416512.0258平差点平差点PJ1435638.277973808.2848421.8153平差点单点PJ834121.313275055.1839588.3155平差点平差点PJ1334394.694775800.8167581.3386平差点平差点PJ1134119.758272078.8766510.4581平差点平差点PJ435358.801773252.6234533.7891平差点单点PJ935758.799272752.6287463.0498平差点平差点PJ1035492.709774125.4413499.2124平差点平差点PJ535161.310975056.6712544.9623平差点单点点位误差
点名dMx(cm)dMy(cm)dM(cm)E(cm)F(cm)Q(°)点类型PJ70.63760.49880.80950.67340.449225.3601PJ120.45650.47890.66170.56850.3386132.0647PJ11.17110.44691.25351.17110.44690.1802PJ140.71850.70951.00970.91990.416444.271PJ80.63770.5720.85660.75960.39639.3255PJ131.03120.55581.17141.05120.517112.5153PJ110.82330.58121.00780.93980.3638148.2729PJ41.3881.51342.05351.90390.7695131.3319PJ90.45090.6430.78540.65310.436276.2342PJ100.60550.51550.79520.67760.4163145.201PJ51.23071.39471.86011.6540.85151.1042高程精度
点名HQxxmH(cm)备注PJ70.24692.2763PJ120.2432.2579PJ10.29392.4833PJ80.26852.3736PJ130.39972.896PJ110.4012.9008PJ90.30422.5265PJ100.42352.981平面可靠性
设站点名照准点名改正数( ″或cm)对角元素统计量内可控性外可控性多余分量粗差下界( ″或cm)边或方向方程号备注PJ3PJ70.58950.04282.37576.28274.73440.43212.3717观测边1PJ2PJ12-0.52190.008-4.85549.35038.38870.19512.2752观测边2PJ2PJ1-0.60960.0618-2.04365.62263.81530.53952.2833观测边3PJ2PJ1401E-10088246.065988246.0658022626.7355观测边4PJ2PJ8-0.29940.0168-1.92418.16537.04380.25582.5124观测边5PJ7PJ130.27660.04771.05515.63573.83460.5372.0162观测边6PJ7PJ80.2740.01242.05297.62036.4040.29371.8767观测边7PJ8PJ13-0.01360.0128-0.17.77146.58310.28241.9848观测边8PJ11PJ70.60890.07951.79946.02954.39290.46922.9788观测边9PJ11PJ3-0.26690.0108-2.14118.51267.44360.23542.1869观测边10PJ11PJ401E-100136159.7493136159.7493053867.7308观测边11PJ11PJ90.26240.03511.16637.47146.22610.30563.0405观测边12PJ9PJ3-0.02190.0175-0.13788.29087.1890.24812.6406观测边13PJ9PJ120.50140.07381.53785.5833.75680.54722.4608观测边14PJ9PJ100.0610.02990.29416.84865.46320.36372.3547观测边15PJ10PJ31.20250.05884.13355.50563.64060.56272.1351观测边16PJ10PJ120.4780.01083.8387.80236.61960.28021.8358观测边17PJ13PJ501E-100100728.6623100728.6622029480.6685观测边18PJ1PJ130.0910.00191.736419.450919.00740.04514.7994观测边19PJ1PJ120.29050.02981.40327.44466.19390.30782.7778观测边20PJ3PJ7-0.3810.4517-0.47246.1454.55020.45177.374观测方向21PJ3PJ20.3810.45170.47246.1454.55020.45177.374观测方向22PJ2PJ12-1.8340.4563-2.26276.11424.50850.45637.3371观测方向23PJ2PJ3-0.66640.5269-0.7655.68963.91340.52696.8275观测方向24PJ2PJ10.5870.63490.61395.1833.13160.63496.2196观测方向25PJ2PJ1401E-1004130004130001E-10495600观测方向26PJ2PJ81.91350.60512.04995.30943.33650.60516.3712观测方向27PJ7PJ130.51780.54260.58575.60653.79150.54266.7278观测方向28PJ7PJ80.33070.43720.41686.24624.6860.43727.4955观测方向29PJ7PJ3-0.84850.2847-1.32517.73976.54570.28479.2876观测方向30PJ8PJ21.38180.45041.71576.15384.56210.45047.3846观测方向31PJ8PJ7-0.78080.3625-1.08066.85925.47640.36258.231观测方向32PJ8PJ13-0.6010.2855-0.93747.73016.53430.28559.2761观测方向33PJ11PJ7-0.60550.5274-0.69485.68723.90980.52746.8246观测方向34PJ11PJ3-0.2470.3997-0.32556.53265.06140.39977.8391观测方向35PJ11PJ401E-1004130004130001E-10495600观测方向36PJ11PJ90.85250.56670.94375.48623.61120.56676.5834观测方向37PJ9PJ31.7260.55681.92765.5353.6850.55686.642观测方向38PJ9PJ12-1.04750.6073-1.12025.29973.32110.60736.3596观测方向39PJ9PJ10-0.67840.5911-0.73545.37193.43520.59116.4463观测方向40PJ10PJ30.89970.10312.335112.863112.1820.103115.4357观测方向41PJ10PJ12-0.89970.1031-2.335112.863112.1820.103115.4357观测方向42PJ12PJ2-0.30.3769-0.40736.72755.31060.37698.073观测方向43PJ12PJ90.30.37690.40736.72755.31060.37698.073观测方向44PJ13PJ801E-1004130004130001E-10495600观测方向45PJ13PJ501E-1004130004130001E-10495600观测方向46PJ1PJ2-0.10330.579-0.11325.42773.52180.5796.5132观测方向47PJ1PJ130.53390.29250.82277.63676.42350.29259.164观测方向48PJ1PJ12-0.43060.5294-0.49315.6763.89360.52946.8112观测方向49高程可靠性
设站点名照准点名改正数(cm)统计量内可靠性外可靠性多余分量粗差下界(cm)PJ3PJ7-5.1518-1.2964.75922.3650.753121.8002PJ2PJ124.82051.20954.74672.33980.75721.743PJ2PJ12.49380.64794.91492.66450.706122.5134PJ2PJ84.66621.19114.82892.50230.731522.1194PJ7PJ13-3.6725-1.01555.2313.21040.623323.9613PJ7PJ8-4.1534-1.05464.80372.45330.739222.0041PJ7PJ35.14211.29364.75922.3650.753121.8002PJ8PJ2-4.6631-1.19034.82892.50230.731522.1194PJ8PJ74.16711.05814.80372.45330.739222.0041PJ8PJ130.50530.1334.97832.77960.688222.8036PJ11PJ7-1.6991-0.50665.64093.84230.53625.8389PJ11PJ33.52260.99375.33643.37950.59924.4442PJ11PJ9-1.8235-0.55375.74423.99230.516926.3119PJ9PJ35.33791.39714.95132.7310.695822.68PJ9PJ12-3.7986-0.97914.87632.59250.717322.3363PJ9PJ100.51590.15015.5033.63680.563225.2073PJ10PJ34.83511.39035.43953.540.576524.9164PJ10PJ12-4.3193-1.23435.40593.48810.583724.7624PJ12PJ2-4.827-1.21114.74672.33980.75721.743PJ12PJ93.87870.99984.87632.59250.717322.3363PJ13PJ8-0.5036-0.13254.97832.77960.688222.8036PJ1PJ2-2.5189-0.65444.91492.66450.706122.5134PJ1PJ132.66360.80555.72093.95870.521226.2052PJ1PJ122.34910.66235.33393.37540.599524.4324注:各个点的误差椭圆、相对误差椭圆等更多内容请参考具体项目的成果页面,这里限于篇幅略。





0 评论