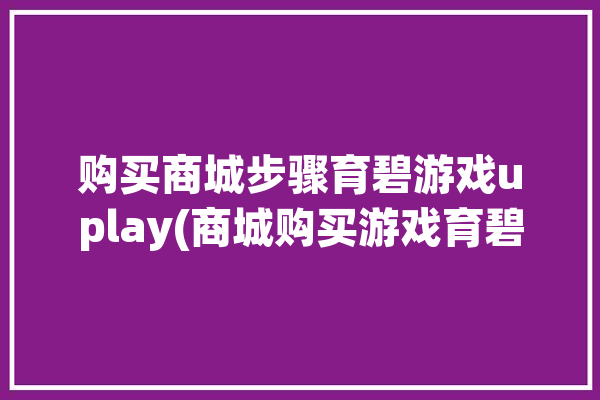
ROS 是一个适用于机器人的开源的元操作系统它提供了操作系统应有的服务,包括硬件抽象,底层设备控制,常用函数的实现,进程间消息传递,以及包管理它也提供用于获取、编译、编写、和跨计算机运行代码所需的工具和库函数在某些方面ROS相当于一种“机器人框架(robot frameworks)”类似的“机器人框架”有:Player,YARP、Orocos、CARMEN、Orca、MOOS和 Microsoft Robotics StudioROS开发时常常使用的工具,分别是:Gazebo、RViz、rqt、rosbag、rosbridge和moveit!这六个工具是我们开发常常用到的工具,gazebo是一种最常用的ROS仿真工具,也是目前仿真ROS效果最好的工具;RViz是可视化工具,是将接收到的信息呈现出来;rqt则是非常好用的数据流可视化工具,有了它我们可以直观的看到消息的通信架构和流通路径;rosbag则是对软件包进行操作的一个命令,此外还提供代码API,对包进行操作编写rosbridge是一个沟通ROS和外界的功能包,moveit!是目前为止应用最广泛的开源操作软件1.GazeboGazebo是一款3D动态仿真模拟器,能够在复杂的室内和室外环境中准确有效地模拟机器人群与游戏引擎提供高保真度的视觉模拟类似,Gazebo提供高保真度的物理模拟,其提供一整套传感器模型,以及对用户和程序非常友好的交互方式 图1 GazeboGazebo的功能很强大,最大的优点是对ROS的支持很好,因为Gazebo和ROS都由OSRF(Open Source Robotics Foundation)开源机器人组织来维护,Gazebo支持很多开源的物理引擎比如最典型的ODE可以进行机器人的运动学、动力学仿真,能够模拟机器人常用的传感器(如激光雷达、摄像头、IMU等),也可以加载自定义的环境和场景,仿真不仅仅只是做出一个很酷的3D场景,更重要的是给机器人一个逼近现实的虚拟物理环境,比如光照条件、物理距离等等设定好具体的参数,让机器人完成我们设定的目标任务比如一些有危险因素的测试,就可以让机器人在仿真的环境中去完成,例如无人车在交通环境复杂的交通要道的效果,我们就可以在仿真的环境下测试各种情况无人车的反应与效果,如车辆的性能、驾驶的策略、车流人流的行为模式等,又或者各种不可控因素如雨雪天气,突发事故,车辆故障等,从而收集结果参数指标信息等等2.RVizRViz(the Robit Visualization tool)机器人可视化工具,可视化的作用是直观的,它极大的方便了监控和调试等操作 图2 Rviz虽然从界面上来看,RViz和Gazebo非常相似,但实际上两者有着很大的不同,Gazebo实现的是仿真,提供一个虚拟的世界,RViz实现的是可视化,呈现接收到的信息3. rqtrqt是一个基于qt开发的可视化工具,拥有扩展性好、灵活易用、跨平台等特点,主要作用和RViz一样都是可视化,但是和RViz相比,rqt要高级一个层次rqt_graph :显示通信架构rqt_plot :绘制曲线rqt_console :查看日志3.1 rqt_graphrqt_graph是来显示通信架构,当前有哪些Node和topic在运行,消息的流向是怎样,都能通过这个语句显示出来此命令可用于显示系统的全貌 图3.1 rqt_graph3.2 rqt_plotrqt_plot将一些参数,尤其是动态参数以曲线的形式绘制出来当我们在开发时利用rqt_plot将这些原始数据用曲线绘制出来,利于我们分析数据 图3.2 rqt_plot3.3 rqt_consolerqt_console里存在一些过滤器,我们可以利用它方便的查到我们需要的日志 图3.3 rqt_console4. Rosbagrosbag 主要用于记录、回放、和分析 rostopic 中的数据rosbag package提供了命令行工具和代码API,可以用C++或者python来编写而且rosbag命令行工具和代码API是稳定的,始终保持向后的兼容性5.rosbridgerosbridge是一个可用于非ROS系统和ROS系统进行通信的功能包,非ROS的系统使用指定数据内容的基于JSON(或BSON)格式的网络请求(rosbridge支持TCP、UDP、WebSocket三种网络通讯方式)来调用ROS的功能,既然非ROS系统能通过rosbridge基于TCP/UDP/WebSocket与机器人上的ROS进行交互,那就是实现了外部系统和机器人上的ROS的解耦合,也就是外部系统完全可以与机器人使用不同的开发语言不同的OS平台6.moveit!2012年,一款叫做moveit!的移动操作软件诞生了,moveit最初在Willow Garage由Sachin Chitta,Ioan Sucan,Gil E. Jones,Acorn Pooley,Suat Gedikli,Dave Hershberger开发,它融合了研究者在运动规划、操纵、3D感知、运动学、控制和导航方面的最新进展,为操作者提供了一个易于使用的平台,使用它可以开发先进的机器人应用,同时它也被广泛应用于工业,商业,研发和其他领域moveit的使用通过为用户提供接口来调用它,包括C++、Python、GUI三种接口ROS中的move_group节点充当整合器,整合多个独立组件,提供ROS风格的Action和servicemove_group通过ROS topic和action与机器人通讯,获取机器人的位置、节点等状态,获取数据再传递给机器人的控制器move_group节点获取到节点状态信息或者机器人变换信息时候,会通过控制器的接口去处理这些信息,比如进行坐标转换、规划场景、3D感知另外,move_group的结构比较容易扩展,不仅具有独立的能力如抓放,运动规划,也可扩展自公共类,但实际作为独立的插件运行moveit系统结构图如下:图4 moveit系统结构图Gazebo、RViz、rqt、rosbag、rosbridge和moveit等ROS常用工具掌握后就可以进行ROS开发了让我们一起畅游在ROS的知识海洋中,站在巨人的肩膀上开拓新的航线
End -技术发展的日新月异,阿木实验室将紧跟技术的脚步,不断把机器人行业最新的技术和硬件推荐给大家看到经过我们培训的学员在技术上突飞猛进,是我们培训最大的价值如果你在机器人行业,就请关注我们的公众号,我们将持续发布机器人行业最有价值的信息和技术本文由博客一文多发平台 OpenWrite 发布



0 评论